一、整體技術參數(shù)
1.輸入電源:三相五線(xiàn)製 AC 380V±10%、50HZ。
2.輸入功率:≤2kw。
3.工作環境:
3.1 溫度:-10℃~+40℃。
3.2 相對濕度:≤90%(+20℃)。
3.3 空氣清潔,無腐蝕性及爆炸性氣體,無導(dǎo)電及能破(pò)壞絕緣的塵(chén)埃。
3.4 安全要求:具有接地保護、漏電保護功能。采用(yòng)高絕(jué)緣的安全型插座及帶絕緣護套的(de)高強度安(ān)全型實驗導線。
二、功(gōng)能特(tè)點
1、設備(bèi)台架
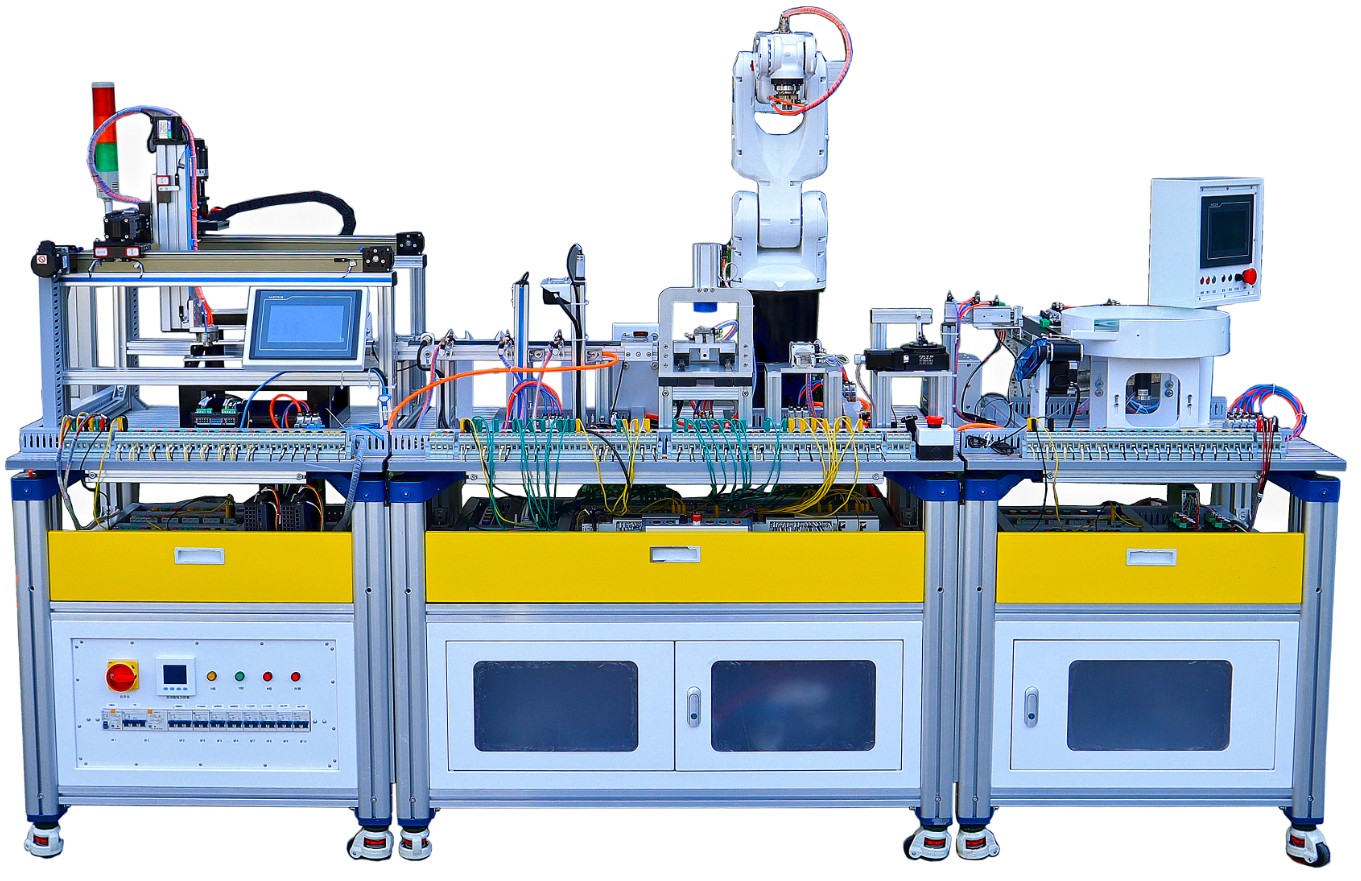
1.1本(běn)設備以鋁合金導軌式實訓台為基礎平台,擴展一張機械(xiè)裝調(diào)實訓台(tái)以及鉗工實(shí)訓台。整體結構采用開放(fàng)式和拆裝式,框架結構主要采用(yòng)鋁合金型材搭建而成,型材有圓角,型(xíng)材桌麵采(cǎi)用懸浮式工作台設計,支撐腳底部帶有萬向腳輪。實訓台下方四(sì)周都采用封門設計,前後麵板采用的可拆卸結構設計,內(nèi)部集成(chéng)電源控製櫃、資料夾、機器人控製櫃以及氣站單元等功能。實訓台設置了三個標準的(de)電源插座,配(pèi)電箱均采用航空快插接口設計。
1.2實訓台可(kě)根據不同形式生產功能要(yào)求將(jiāng)多個實訓台組合(hé)成不(bú)同長寬(kuān)的基礎工作麵,然後在基礎平台上根(gēn)據現(xiàn)有的機(jī)械部件,以模塊化的方式組裝和搭建具有生產功能的智能生產線設備,也可(kě)添加(jiā)其它機械部件組(zǔ)裝其他生產設備,使整個裝置能夠靈活的按教學或要(yào)求組(zǔ)裝(zhuāng)具有生產功能的智能生產(chǎn)線設備。
1.3實訓台(tái)另外單獨配套一張機械裝調(diào)單元(yuán)的工作台(實(shí)訓台4)和一張鉗工台,機(jī)械裝調工作台可用做於十字滑台、轉(zhuǎn)塔衝壓機構等機械裝配單元的模塊搭建與(yǔ)調試:鉗工台(tái)可(kě)用於零部(bù)件的組裝,測量以及方便地存放工作時所需要的手工具和零部件。
1.4實訓台的控製單元采用網孔式,可根據不用(yòng)的控(kòng)製要求,選擇或(huò)擴展相(xiàng)關的電氣控製元器件,靈活的安裝在(zài)網孔麵上,自由搭建、布局靈活、擴展性和互換性強,實訓操作時更加(jiā)貼近工業自動化設備(bèi)生產操作環境。
2、電源供電
設備的配電箱位於實(shí)訓台(tái)2的下方,電源供電采(cǎi)用配電箱集中配電方式,設備供電采用兩(liǎng)組獨立(lì)的供電進線方式,其中一組為三相五(wǔ)線(xiàn)製AC 380V的進線方式,電源(yuán)進線經設備負荷開關再到三相漏電保護開關,最後經過各小型斷路開關單獨給設備各單元模塊進行供電,配電箱後側麵板均采用航空快插接口設計,使各單(dān)元電源連接更加方便,靈活。配電箱中還配置一台直流開關穩壓電源,輸出為DC24V/10A,為(wéi)係統提供穩定可靠的控製直流電(diàn)源。另一組采(cǎi)用單相AC 220V的進線方式,給外(wài)圍設(shè)備(計算機(jī)、線號機、小型氣泵等)進行供電,供電接口位於設備的(de)兩側。
3、PLC、變頻器及觸摸屏模塊
PLC、變頻器及觸摸屏控製(zhì)係統模塊的配(pèi)置,人機界(jiè)麵采用7寸彩色觸摸屏,配套安裝(zhuāng)支(zhī)架,支(zhī)架可固定與實訓台架鋁合金台麵上。本設備中的PLC、變(biàn)頻器、按鈕指示燈控製元(yuán)件及其它電氣元件均安裝在網孔式抽屜中,可進行靈活的布局、安裝、接線和(hé)擴(kuò)展(zhǎn)。
4、采用插接線一體化接線端子
本設備的PLC模塊的I/O 端子、變(biàn)頻器的接線端(duān)子、各指令開關、光電開關、傳感器和(hé)指(zhǐ)示元件的電路,控(kòng)製元件電路均采用接插線一體化兩用的(de)接線端子。
當采用即插即(jí)用型端子插接方式接線時,可增(zēng)強學生對PLC接(jiē)線的認識,使用靈活,安裝方便。當采用直接接線方式,則更加接近工廠實際,能更好的提高學生接線的動手能力。該接線(xiàn)端子還可根據不同的電氣屬性,選用不同顏(yán)色的安全插座,可進行靈活的組合和端子布局。既保證學生(shēng)基本技能的訓練、形成和鞏固,又保證(zhèng)電路連接的快速、安全和可靠。
5、供料裝置
在該設備中的供料裝置提供了多種不同形式的供料機構,在搭(dā)建自動化生產線時(shí),可根據不同場(chǎng)景的供料需求選(xuǎn)擇相(xiàng)關供料模塊。
托盤式(shì)供料台機構采用多(duō)層托盤結(jié)構設計,托盤采用3×3排列設(shè)計,每個托盤可放置多種不同屬性(xìng)的物料,供料時,通過(guò)工業(yè)機器人(rén)直接在托盤上抓取。
轉盤式(shì)供(gòng)料底(dǐ)部裝有直流減速電機,作為旋轉動力與(yǔ)送料盤內部的螺旋葉片連接,供料時,直流電機驅動螺(luó)旋葉片旋轉,將物料送至出料口。
十字滑台機構通過驅動兩根高精度滾(gǔn)珠(zhū)絲杆及滾珠式雙滑塊平麵直線線性導軌,構成X、Y兩軸定(dìng)位裝置,在平麵內可完成各種高精度、高難度的供(gòng)料移(yí)動或加工傳動。
6、傳送帶輸送分揀裝置
采用步進電機和三相異步電動機(jī)電機(jī)加編碼器兩種不同驅動方(fāng)式的傳送帶,傳送帶運行時,物料可在傳送帶上進行自由定位,以滿足物料(liào)在不同(tóng)位置(zhì)的檢測,分揀,抓取(qǔ)等功能。在(zài)傳送帶兩端處設計有擋料口,通過光電傳(chuán)感器檢測物料(liào);傳送帶上裝有三個(gè)出料槽(cáo),同時正對料槽位置裝有推料氣缸,對不同類型的物料(liào)進行分揀。
7、物料檢測裝置
以梅花型聯軸器作為(wéi)物料的檢(jiǎn)測對象,在智能生產設備中配置有傳感(gǎn)器檢測裝置,可(kě)檢測出聯軸(zhóu)器的高度,外徑大小等屬性信息。
8、工業機械(xiè)手裝置
該設備具有工業(yè)機器人和(hé)直角坐標機械手兩種工業機械(xiè)手裝置,工業(yè)機器人,該兩種機械手在係統中主要用(yòng)於物料的搬運(yùn)或者進行工件裝配等(děng)工作,可根據不通的功能(néng)需求(qiú),進行組合(hé)或者功(gōng)能互換。
工業機器人在搬(bān)運或(huò)裝配的過程中,根據不同的搬運對象或者不同的裝(zhuāng)配流程,需要(yào)用到不(bú)同的夾具,平台配置(zhì)多種氣(qì)動快換裝置,以(yǐ)滿足不同的工裝要求。
9、工(gōng)件旋轉及(jí)翻轉裝置(zhì)
滿足工件在旋轉工(gōng)作台(tái)平麵上任意角度的旋(xuán)轉及位置校準(zhǔn),翻轉(zhuǎn)機構滿(mǎn)足(zú)工件在垂(chuí)直工作麵上180度的(de)翻轉。
10、衝壓裝置(zhì)
在該設備中的供料裝置提供了兩種不同形式的衝壓機構:伸縮(suō)衝壓和機械式衝壓;在搭建自動化生產(chǎn)線時,可根據(jù)不同衝壓加工場景選(xuǎn)擇相關衝壓加工模塊。
伸縮衝壓機構(gòu)主要包括伸縮滑動料台,模擬衝頭和衝床,物料台伸出/縮回(huí)氣缸(gāng)等組成。該裝置(zhì)的主要功能是該把該單元物料台上的工件(工件由抓取機械手裝置供料送來)送到衝壓機(jī)構(gòu)下麵,完成一次衝壓加工動作,然後再送回到物料(liào)台上,等待機械手(shǒu)裝置取(qǔ)出。
機械衝壓機構(gòu)主要由旋轉部件、模具、自動衝壓部(bù)件等部分組成,可根據加工要(yào)求通過步進電機的轉動完成旋轉部件中多形狀衝壓模具的更換動作,並通過氣動定位係統對旋轉模塊(kuài)進(jìn)行精(jīng)確定位;最後利用氣液增壓(yā)缸以及冷衝壓模具的聯(lián)合動(dòng)作對物料進行精密衝壓。
11、倉庫裝置
平台配置兩種不同形式的倉庫單元(yuán):平麵式倉庫(kù)和直入式立體倉庫(kù);在搭(dā)建自(zì)動化生產線時,可根據不同存儲管理場景選擇相關(guān)的倉庫模塊。
平麵式倉庫裝置采用(yòng)5層(céng)6列的梯形結構設計,在每一層的庫位中,可放置3個物料托盤,每個托盤可放置兩種不同屬(shǔ)性的物料,在出入庫時,通過機(jī)械手的夾具,對托(tuō)盤或者直接對(duì)物料進行出入庫的(de)搬運。
直入(rù)式(shì)立體倉(cāng)庫主要由貨架(jià)和堆垛機兩大部分組成,貨架采用(yòng)3層×3列設計,堆垛機的橫軸(zhóu)和豎軸機械傳(chuán)動采用高精密的步進電機驅動,配以先進地機械設計、精密的機械(xiè)加工及裝配,通過平(píng)行和上下移動,將物料平穩(wěn)精確的(de)送入指定(dìng)庫位。
在物(wù)料托盤中嵌入了RFID電子標簽、條形碼或二維碼圖形標簽,可以對倉(cāng)庫的物料進行數據化信息管理,在讀(dú)寫信息時,可通過RFID讀寫控製器或掃碼槍操作進行(háng)信息的錄入和讀取,實現倉儲的智能化、信息化管理。
12.實驗室(shì)安全管理平台軟件(正版軟件)
12.1 電源管理終(zhōng)端由 2.8 寸 TFT 彩色液(yè)晶(jīng)顯示屏和(hé)數據采集模塊組成,實時顯示實驗台三相電流值、三相電壓值、三相有功功率值(zhí)、三相無功功率、功率因數、頻率等電參數。
12.2 電源管理終端(duān)啟動時需(xū)輸入正確密碼才能啟動電(diàn)源(yuán),避免學員誤操作;
12.3 輸入正確密碼登錄以後可以設置定時開關機、過壓報警開與(yǔ)關、過壓報警值、欠壓報警開與關、欠壓報警值、過流報警開與關、過流(liú)報(bào)警值、餘額不足(zú)報警(jǐng)開與(yǔ)關
12.4 登錄以後可以進行報警記錄查看(kàn),電量充(chōng)值和(hé)剩餘電量清零等操作;並且可以更改登錄密碼,係統對時模式設置,熱點配網;
12.5 通過手機 APP 可以查詢電源管理終端電源開關狀態,可以單獨開啟關閉(bì)學生實(shí)驗台電源;全部開啟或(huò)全部關閉實驗台電源功能;定時(shí)預約(yuē)實驗台(tái)電源開啟關閉功能。
12.6 APP 軟件實時顯示設(shè)備溫度、用(yòng)電量柱狀圖、三相總(zǒng)有功功率、總無功功率、A 相有功功率、A 相無功功率(lǜ)、A 相功率因數、B 相(xiàng)有功功率、B 相無(wú)功功率、B 相功(gōng)率因數、C 相有功功率、C 相無功功(gōng)率、C 相功(gōng)率因數、電網頻率
12.7 APP 軟件可以設置過壓報警開與關、過壓報警值、欠壓報(bào)警開與關、欠壓報(bào)警值(zhí)、過流報警(jǐng)開與關、過(guò)流報警值、餘額(é)不足報警(jǐng)開(kāi)與關
12.8 APP 軟件可(kě)以給電表設備進行(háng)電量充(chōng)值。
12.9 通過 APP 可以把設備分享(xiǎng)給其他成員
12.10 APP 軟(ruǎn)件的操作會實時的(de)同步到電(diàn)源管理終(zhōng)端
13、智能(néng)教學測控模塊(整個教室(shì)配置1套)
係統采用一體化設計(拒絕采用功能(néng)拚湊型),7 寸彩色中文觸控屏係統管理器,中文菜單式觸控操作界麵,人(rén)機對話友好。該係統集成示波器、任意函(hán)數波形發生器、PWM 脈衝(chōng)發生器、模擬數據測量、故障(zhàng)模擬(nǐ)發生器(qì)、數字量(liàng)輸入監(jiān)測六大功能模塊。
14.工業 4.0 仿真實訓軟件(正版軟件)
軟件采用三(sān)維建模基於虛擬現實技(jì)術的計算機仿真模擬技術,可(kě)以進行電氣仿(fǎng)真、電子仿真、在線學習(xí),氣動仿真、液壓仿(fǎng)真、傳感器仿真(zhēn)等常用工業技術仿真
四、實訓項目(mù)
1、機電設備的裝配與調整項目
該裝置配置的機電設備部件、氣缸、直流電機、步進電機、伺服電機、傳感器等器件可完成下(xià)列機電設備組裝工作任務:
1.1 機械識(shí)圖與裝配工藝的編寫;
1.2 轉盤供料機構的裝配與調整;
1.3 托盤供料機構的裝配(pèi)與調整;
1.4 十字滑台機構(gòu)的裝(zhuāng)配與調(diào)整;
1.5 皮帶輸送機的裝配與調(diào)整;
1.6 物件分揀機構的裝(zhuāng)配與(yǔ)調整(zhěng);
1.7 直角坐標機械(xiè)手機構裝(zhuāng)配與調整;
1.8 工業機器人單元的(de)定位安(ān)裝調整;
1.9 旋轉機構的組裝與調整;
1.10 翻轉機構的組裝與調整;
1.11 伸縮(suō)式(shì)衝壓機構的裝配與調(diào)整;
1.12 轉塔衝壓(yā)機構的裝配與調整
1.13 智能立體倉(cāng)庫機構的裝配與(yǔ)調整;
1.14 自動生產線設備組裝與調(diào)整。
2、氣動係統的安裝與(yǔ)調試項目(mù):
該(gāi)裝(zhuāng)置配置的單出杆氣缸、氣動手爪、旋轉氣(qì)缸、氣動(dòng)快換機構等(děng)氣動執行元件和(hé)單控電磁換向閥、雙控電磁換向閥和磁性開關等氣動控製元(yuán)件,可(kě)完成下列氣(qì)動技術的工作任務:
2.1 氣動方向控製回路的(de)安裝與調試;
2.2 氣動速度控製(zhì)回路的(de)安裝與調試;
2.3 氣動擺動(dòng)控製回路的安裝與調試;
2.4 氣(qì)動順序控製回路的安(ān)裝與調試;
2.5 氣動快換控製回路的安裝與調試(shì);
2.6 氣動係統安裝與(yǔ)調試(shì);
3、電氣控製電路的安裝與調試
該裝置配置的PLC可編程控製器控製、變(biàn)頻(pín)器、步進電機和伺服電機驅(qū)動控(kòng)製係統和指令開關、傳感器等,可完成下列電氣控製電路的安裝與(yǔ)調試工(gōng)作任務:
3.1 供料單元控製電(diàn)路的(de)連接與調試;
3.2 十字滑台單元電路的連接與調試
3.3 變頻(pín)器驅動的輸送分揀控(kòng)製電路的連接與調試;
3.4 步進電機驅(qū)動的輸送分揀控(kòng)製電路的連接與調試;
3.5 直角坐標機械手電氣控(kòng)製電路的連接與調試;
3.6 工業機器人單元控製電路的連接與調試;
3.7 工件(jiàn)旋轉(zhuǎn)單(dān)元(yuán)控製電路(lù)的連接與調試;
3.8 工件翻轉單(dān)元控製電路的連接與調試;
3.9 工件伸縮衝壓(yā)單元控製電路的(de)連(lián)接與調(diào)試;
3.10 工件轉塔衝壓單元控製電路的連接與調試;
3.11 智能立體倉庫單元電路的連接與調試;
3.12 視覺識別係統電路的連接(jiē)與調試(shì);
3.13 掃碼槍與 RFID 信息讀(dú)寫係統電路的連接與調試;
3.14 通用機電設備整機控製電路的(de)連接與調試;
4、機電設備(bèi)程序控製與調試項目
4.1 供料單元 PLC 控製程序編寫與調試;
4.2 十字滑台單(dān)元的 PLC 定位(wèi)控製(zhì)程序編寫與調試;
4.3 三相異(yì)步電機驅動的(de)輸送分(fèn)揀單元 PLC 控(kòng)製編寫與(yǔ)調試(shì);
4.4 步進電(diàn)機驅動的(de)輸(shū)送分揀 PLC 控(kòng)製(zhì)編寫與調試(shì);
4.5 直角坐標機(jī)械手 PLC 控製程序編(biān)寫(xiě)與調試;
4.6 工業機器人單(dān)元(yuán) PLC 控製程序編寫與調試;
4.7 工件旋轉單元(yuán) PLC 控製程序編寫與調試(shì);
4.8 工件翻轉單元 PLC 控製程序編寫與調試;
4.9 工件伸縮衝壓單元 PLC 控製程序編寫與調試;
4.10 工件轉塔衝壓單元 PLC 控製程序編寫與調試;
4.11 立體倉庫單元 PLC 控製(zhì)程序編寫與調試;
4.12 視覺識別係統流程(chéng)編輯、PLC 程序編寫與調試;
4.13 掃碼槍與 RFID 信息(xī)讀寫係(xì)統 PLC 程序編寫與調試;
4.14 通用機電設備整機(jī) PLC 控製程序編(biān)寫(xiě)與調試;
5.機電設備安裝與調試實訓裝備用於(yú)考核或技能競賽,可考察的(de)職業能力:
5.1 機械識圖(tú)能力;
5.2 機械構件的裝配(pèi)與調整能力(lì);
5.3 機電設(shè)備的(de)安裝與調試(shì)能力;
5.4 電(diàn)路安裝能力;
5.5 氣動係統的安裝與調試能(néng)力;
5.6 通用機電設備的控製程序的編寫與調試能力;
5.7 自動控製係統的安裝與調試能力




 當前位置:
當前位置: 


 上一篇(piān):
上一篇(piān): 返回列表(biǎo)
返回列表(biǎo)


 友情(qíng)鏈接:
友情(qíng)鏈接: