HYRX- J2B 機電一體化綜合實(shí)訓考核設備(bèi)
一、產品概述
機電一體化綜合實訓考核設備是基於《國家中長期(qī)人才發展規劃綱要(2010-2020年)》對經濟社會(huì)發展重點領域急需緊缺(quē)專門人才及創新型科技人才的培養要求,依據國(guó)家相關職業工種培養及鑒定標準,結合中國當前製造業的崗位需求,接軌世界技能競賽(World skills)相關標準及規程開發設計而成。該(gāi)套係統由“工作站(zhàn)”(Working Station)形式綜合體(tǐ)現。
“工作站”可以模塊方式自由(yóu)組合,形成多種模式,操作者不但在實習、工作中培養(yǎng)、訓練(liàn)了機(jī)械裝調、電氣(qì)管路連接、程序設(shè)計、工業機(jī)器人應用、傳感器應用、計算機應(yīng)用、檢修(xiū)排(pái)故、觸摸屏組態、伺服、步進(jìn)驅動控製等機(jī)電專業技能,同時也體驗到(dào)職(zhí)業素(sù)養中的社會能力與方法能力。
該設備技術涵蓋麵廣,定位前瞻,是(shì)機電一體化(huà)專業教學實習(xí)、技能鑒定和技能競賽的絕佳載體。
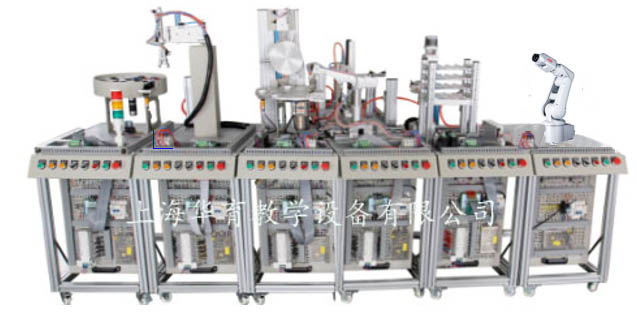

二、產品(pǐn)結構
每個獨立的(de)單元由實訓桌、執行機構及(jí)掛板構成。每套(tào)設備除配(pèi)獨立的單元外(wài),電腦桌等(děng)。
實訓桌:鋁型材拚接而成(chéng)。實訓桌下方裝有四個萬向輪和四(sì)個可調腳,萬向輪移動時用(yòng),可調腳固定時用(yòng)。實訓桌台麵是用鋁型材拚接而成,方(fāng)便學生將工件在其上任意位置、任意方式地安裝,而不局限於在給定的孔位上按給(gěi)定的方式安(ān)裝。
執行機構:采用鋁板精加工(gōng)後組裝而成,表麵噴(pēn)砂後陽極氧化,既防腐(fǔ)蝕又(yòu)美觀大方。
掛板:斜裝於實訓桌正下方,可很(hěn)方便地取、卸。掛板上裝有PLC、變頻器等(děng)電器元件,統一由(yóu)電(diàn)纜線及快速插頭與實訓桌上(shàng)的執行(háng)機構連(lián)接。
三、產品特點
1. 係統(tǒng)應用綜合性
係統包括了智能裝配生產(chǎn)係統、自動包(bāo)裝係統、自動化立體倉庫及智能物流(liú)係統、自動檢測機質量控製係統、生產過程(chéng)數據采集及控製係統等子係統
2. 知識技能全麵性
設備涉及(jí)工業機(jī)器人應用技術(shù)、PLC及特殊功能模塊技術、觸(chù)摸屏應用技術、通信應(yīng)用(yòng)技術、交流伺服(fú)應用技術、交流變頻應用技術、電力電子應用技術、傳感器應(yīng)用技術、氣動控製技術、機械裝(zhuāng)調技術機電一體化知識性能。
3. 組合靈活性
設備按功(gōng)能化分為5個單元 ,可靈活(huó)搭配;
模塊(kuài)化的設計,可以模塊裝調(diào),位置靈活調整,總裝連接迅速方便;
單元中自由組合模塊連接(jiē)進行實訓;
四、產品配置與參數(shù)
1)額定電壓:AC220V ±10%
2)額定功率:2KW
3)環(huán)境濕度:≤90%
4)安全保護功能:急停按鈕,漏電保護,過流保護等用(yòng)電安全保護功能
5)PLC: FX2N-48MR +FX2N-485BD / FX2N-48MT +FX2N-485BD
6)伺服:驅動器MR-JE-10A / 電機 HG-KN13J-S100
7)變頻器:FR-D720S-0.4K
8)步(bù)進驅(qū)動器:TB6600 步進電機:57BYG250B
9)機器人:SD500E 有效負載 3kg
10)設備重量:280kg
11)單站尺寸:L600mm×W720mm×H1500mm
12)設備尺寸(cùn):L4800mm×W720mm×H1500mm
13)工作站尺寸:L4800mm×W2500mm×H1500mm
五、機電(diàn)一體化綜合實訓考核設(shè)備(bèi)成套配置清單
詳(xiáng)細清單備索
六、設備配(pèi)置功能說明
1、顆粒上料單元:
主要(yào)由掛板(bǎn)控製板、上料(liào)輸送皮帶、主輸送(sòng)模(mó)塊(kuài)、循環選料模塊、上料填裝模塊、實訓桌組(zǔ)成,可進行PLC控製、變頻器控製、直流電機控製(zhì)、傳感器設置(zhì)、氣動(dòng)元件原理等多項實訓項目。控(kòng)製流程如下:
上料輸(shū)送皮帶逐個將空瓶輸送到主輸送帶;同時循環選料將料筒(tǒng)內的(de)物料推出,對顆粒物料根據顏色進行分揀;當(dāng)空瓶到達填裝位後,頂瓶裝置將空(kōng)瓶固定,主皮(pí)帶停止;上料(liào)填裝模(mó)塊將分揀到位的顆粒物料吸取放到空瓶內;瓶子(zǐ)內物料到達設定的顆粒數量後,頂瓶裝置鬆開(kāi),主皮帶啟動,將瓶子輸送到下一個工位。此單元可以設定多樣化的填裝方式(shì),可從物料顏色(2種)、顆粒數(shù)量(最多4粒)進行不同的(de)組合,產生8種填裝方式。
2、加蓋擰蓋單元:
主要由掛板控製板、輸送模塊、加蓋(gài)模塊、擰蓋模塊、實訓桌組成,可(kě)進行PLC控製、傳感器設置、氣動元件原理、機械裝調等多(duō)項實訓項目。控(kòng)製流程如下:
瓶子被輸送到加蓋模塊下,加蓋位頂瓶裝置(zhì)將瓶子固定,加蓋機構啟動加蓋流程,將蓋子(白色或藍色)加到瓶子上;加上蓋子的瓶子繼續被送往擰蓋機構,到擰(nǐng)蓋模塊下方,擰蓋位頂瓶裝置將瓶(píng)子固定(dìng),擰蓋機構啟動,將瓶(píng)蓋擰緊。
3、檢測(cè)分揀單元:
主要由掛板控製板、主輸送模塊、龍(lóng)門檢測模塊、輔輸送帶組件、分揀機構、實訓桌組成,可進行PLC控製、傳感器設置、傳感器組合(hé)檢測(cè)、氣動元件(jiàn)原理、機械裝(zhuāng)調等多項實訓項目(mù)。控(kòng)製流程如下:
擰(nǐng)蓋完成的瓶子經過此單元進行檢測:回歸反射傳(chuán)感器檢測瓶蓋是否擰緊;龍門機構檢測(cè)瓶子內部顆粒是否符合要求;對擰蓋與顆粒均合格的瓶子進行瓶蓋顏色判(pàn)別區分;擰蓋或顆粒不合格的瓶子被分揀機構推送到(dào)廢品皮帶上(輔皮帶);擰蓋與顆粒(lì)均合格的瓶子被輸(shū)送到皮帶末端,等待(dài)機器人搬運。
4、六(liù)軸機器(qì)人單元:
主要由掛(guà)板控製板、升降台A模塊、升降台B模塊、新時達六軸機器人及(jí)控製器、實訓桌組成,可進行PLC控製、六軸機器人控製、步進驅動器係統控製、氣動元件原理、機(jī)械裝(zhuāng)調等多(duō)項(xiàng)實訓項目。控製流程如下:
兩個(gè)升降台模塊存儲包裝盒(hé)和包裝盒(hé)蓋;A升降台將包裝盒推向物料台上;6軸機器人將瓶(píng)子抓取放入物料台(tái)上的包裝盒(hé)內;包裝盒4個工位放滿瓶(píng)子後,6軸機器人從B升降台上吸取盒蓋,蓋在包裝盒上;6軸機器人根據瓶蓋的顏色對盒蓋上標簽位分別進行貼標,貼完4個標簽等待成品入倉單元入庫;
5、成(chéng)品入倉單元:
主要(yào)由掛板控製板、堆垛機模塊、成品倉庫模塊、實訓桌組成,可進行PLC控製、伺服係統控製、傳感器(qì)智能係統控製、氣動元件原理、機械裝調等多(duō)項實訓項目。控製流程如下:
堆垛機模塊把機器人單元物料台上的包裝盒體(tǐ)吸取出來,然後按要求依次放入倉儲相應倉位。2×3的倉庫每個倉位均安裝一個檢測傳感器,堆垛機構水平軸為一個精密轉(zhuǎn)盤機構,垂(chuí)直機構為渦(wō)輪絲(sī)杆升降機構,均由精密伺服電機進行高精度控製。
6、產品配件包:
包含了PLC編程線、機器(qì)人USB下載線、觸摸屏USB下載線、485通訊線、空氣(qì)壓縮機、排插座、物料瓶身、藍色/白色瓶蓋、藍色/白色物料塊、藍色/白(bái)色標簽、發貨光盤、設備使用說明書、安裝螺絲螺母等(děng)
七、實(shí)訓項(xiàng)目
PLC部分
1.PLC編程軟件(jiàn)應用
2. PLC基本指(zhǐ)令的應用
3. PLC功能指令的應用
4.PLC步進指令的應(yīng)用
5. PLC控製傳輸帶啟停
6. PLC判斷多種物料屬性
7.PLC判斷物料放置位
8.PLC對傳輸帶運行的絕對定位控製
9.PLC對傳輸帶的混合定位控製
10.PLC對6軸機器(qì)人(rén)的基本動作控製
11.利用脈衝指令對(duì)步(bù)進(jìn)電機控製
12.PLC對6軸工(gōng)業機器人(rén)自動控製
13.PLC對堆垛機(jī)模塊升降控製
14.PLC對倉庫出庫入庫自動控製
15.PLC對倉庫間倉位調(diào)配的控製
人機界麵係統實訓
1.軟件安裝
2.窗口組態
3.工程製(zhì)作與下載
4.PLC寄存器連接
5.簡單動畫組態
6.報警組態
7.數(shù)據存儲於PLC或(huò)HMI的用法(fǎ)
8.觸摸(mō)屏監控(kòng)各工作單元設備
9.觸摸屏對整體實訓流程監控與(yǔ)管理
10.通過觸摸屏對整套係統參數設置
11.觸摸屏(píng)對係統報警代碼查詢與處理
12.觸摸屏實現故障設置於診斷排除(chú)
變頻器係統實(shí)訓
1.變頻器基本接線操作
2. 變頻器功能參數設置與操作
3.PU操作及外部操作
4. 多檔轉速的PLC控製
5. 電機正(zhèng)反轉運(yùn)動控製
6.速度定位係統實訓
7.變頻器的外部運行、組合運行實訓
8.多(duō)段速(sù)電機控製實訓
9.瞬時(shí)停(tíng)電啟動控製實訓
10.麵板參數複製實訓
11.多位置定位參數調節
機器人係統實(shí)訓
1. 6軸機器人軟件操作
2. 6軸機器人程序編寫
3. 6軸機器人原點與複位
4. 6軸機器人點示教實訓
5. 6軸機器人與PLC I/O通訊實訓
6. 網絡IO監控機器人工作狀態
7. 6軸機器人位(wèi)置變(biàn)量使用實訓
8. 6軸機器人抓手控製實訓
9. 6軸機(jī)器人位置運算實訓
步進電機應用實訓
1. 步進(jìn)電機接線操作(zuò)
2. 步(bù)進驅動器參數設置修改
3. 升降台模塊升降(jiàng)定位實訓
4. 步進係統控製(zhì)實訓
交流伺(sì)服係統實訓
1.交流伺(sì)服係(xì)統基本接線操作
2.放大器參數設置
3.反饋與脈衝數觀察
4.脈衝輸入控製(zhì)正反轉
5.帶速度反饋的脈衝控製正反轉
6.故障代碼的熟悉與排除
傳感器部分實訓
1.數字光纖傳感器對(duì)單(dān)一顏色分揀實訓
2.光電傳感器實訓
3.磁性(xìng)開關實訓
4.對射型與反射型傳感器的應用
網(wǎng)絡部分實訓
1.RS485網絡實訓
2.觸摸屏通過PU控製變頻器實訓
3.PLC通過RS指令(lìng)控製變頻(pín)器實訓
4.PLC、觸摸屏與變頻器通訊控製
5.N:N網絡搭建與調整實訓
6.現場(chǎng)總線網絡操作與設置
7.現場總線(xiàn)網絡搭建入門
機械部分
1.循環選料(liào)模塊的裝調
2.顆粒上料模(mó)塊的裝調
3.輸(shū)送帶模塊的裝調
4.加蓋模塊的裝調(diào)
5.擰蓋模塊的裝調
6.檢測模塊的裝調
7.升降台A模塊的(de)裝調
8.升降台B模塊的裝調
9.堆垛機模塊的裝(zhuāng)調
10.成品倉(cāng)庫模塊的裝調
係統(tǒng)調試
1. 掛板控製板安裝接線實訓任務
2. 單元模型接線與氣路連接調試工作
3. 工藝要求實訓(xùn)




 當前位置:
當前位置: 


 上一篇:
上一篇: 返回列表
返回列表


 友情鏈接(jiē):
友情鏈接(jiē):